AI要約
電磁誘導式のバックセンサーを活用し、Arduinoで物体との距離を測定できるか試しました。素材による感度の違いを調べ、最後に他のセンサー方式との比較も行いました。
やること
ロボットの衝突防止のために近接センサーを導入するぞ、の第4弾です。そろそろ辛い。。
自動車用のバックセンサーにも種類があって、電磁誘導式というのがあるんですね。接近した金属内に発生した渦電流の熱損失からインピーダンスの変化をうんぬんかんぬん。
これも面白そうですね。今回は車の電磁誘導式バックセンサーから検出距離を取り出せないか試してみましょう。
材料
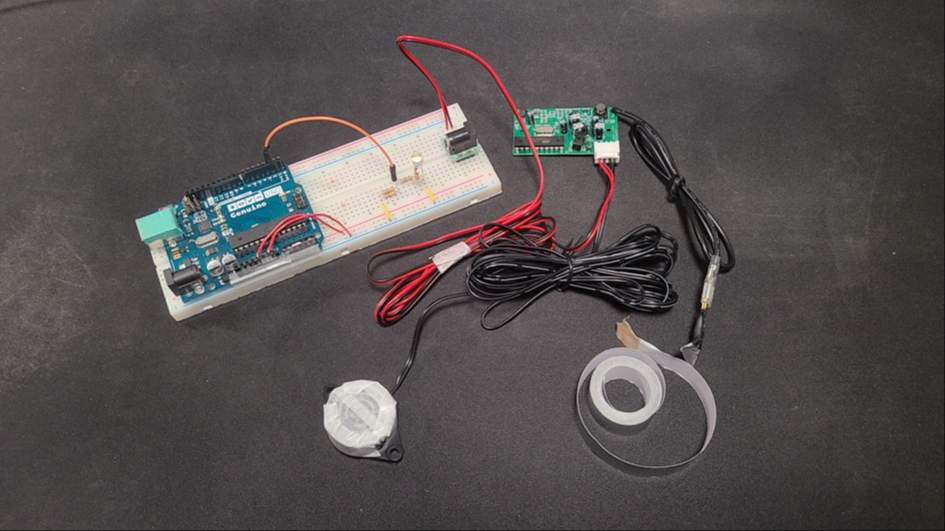
Amazonで電磁誘導式バックセンサーを買いました。2000円くらいです。

駆動電圧は12V(車載機器はだいたい12V、覚えました)。検出器はアルミ箔テープ。これを車のバンパーに貼り付けるとのこと。
説明によると「3 フィートの範囲が検出され、信号はさまざまなビープ音周波数でオブジェクトの距離を示します」
前回の超音波式バックセンサーと雰囲気は同じですね。3フィートは約90cmです。
動作確認、信号を取り出す
電磁誘導式は検出可能な素材が限られるらしい。いろいろ試してみました。
| 素材 | 検出できる? |
|---|---|
| 手 | ◯ |
| アルミ | ◯ |
| 木 | △ |
| プラスチック | ✕ |
| マヨネース | ◯ |
| 缶詰 | ◯ |
| 靴下 | ✕ |
電磁誘導なので、検出対象は金属や水分などの導電性物質に限られるということですね。木はわずかに水分を含んでいるおかげか、ギリギリまで近づけるとブザーが鳴りました。ロボットのセンサーに使うことを考えると、木やプラスチックが検出できないのはBADポイントでございます。
素材によって感度が違うのかぁ。基板を見ても感度調整の可変抵抗などない・・・距離わからん。
他の特徴として、変化量だけを検出する。しかも接近する方向の変化だけに反応するよう。これのメリットは取り付ける環境が自由なこと(超音波式はセンサーを遮らないようにとか角度とかうるさい)。デメリットは車が止まっていると何も検出できない。これもロボット的にはBADポイントだと思います。
前回と同じようにブザーに12V(実際には10V)の直流が来ていました。なので前回と同じ分圧回路、同じコードで信号を取り出すことができました。動画の終盤にその様子を入れてあります。
おわりに
ここまでで
- 超音波式
- レーザー式(赤外線+ToF)
- 超音波式バックセンサー
- 電磁誘導式バックセンサー
と4種類の近接センサーを試してきました。他にも、
- CMOS式(赤外線+三角測量)
- PSD式(赤外線+三角測量)
も秋月に売っていました。
超音波式はガバガバで小さい物体を検出できない。電磁誘導式は素材依存、変化量しか検出しない。赤外線+三角測量は屋外では日光の影響を受けやすい。赤外線+ToF(Time of Flight)は跳ね返りの時間を使うので日光にも強いらしい。
とりあえず今回の結論は、少しコストはかかりますがレーザー式を採用しようと思います。