やること
六角形のフィールドでライフゲームに挑戦します。
参考文献
これらを参考にさせていただきました。
http://www.kurims.kyoto-u.ac.jp/~kyodo/kokyuroku/contents/pdf/0853-10.pdf

https://blogs.yahoo.co.jp/white_rime/26019642.html
blogs.yahoo.co.jp
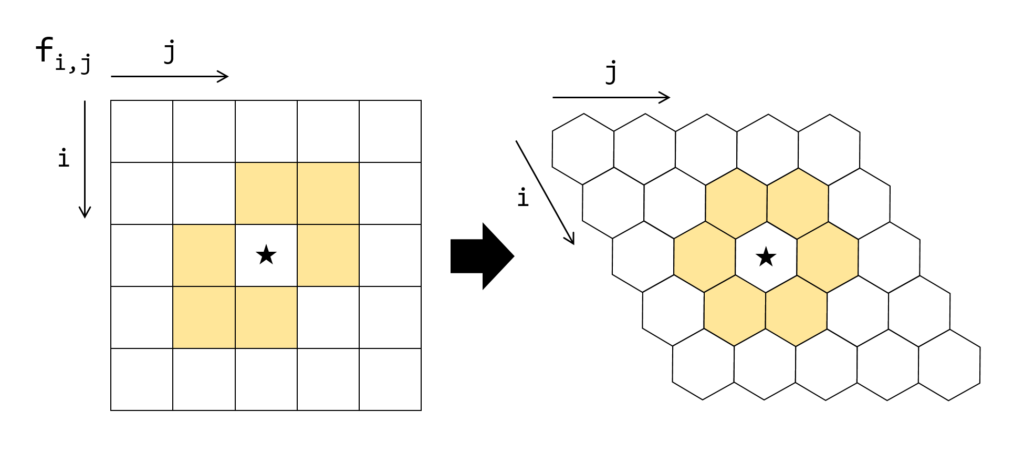
考え方(六角形の表示方法)
2次元配列を斜めにひねって表示することにします。よって、ステップの繰り返し計算においては、8近傍から左上と右下を除いた6近傍の状態を見ることになります。
生存ルールは245/25とします。
| 次のステップでの生存条件 | |
| 生存セル | 隣接する8セルのうち生存セルが2、4、5個 |
| 死セル | 隣接する8セルのうち生存セルが2、5個 |
実行環境
どちらかを用いますが、WinPythonをおすすめします。WinPythonでは図が紙芝居のようにパラパラ流れて見やすいですが、Colabではスクロールする必要があり見づらいです。
Colabにも対応しました!(推奨)
WinPython3.6をおすすめしています。

WinPython - Browse /WinPython_3.6/3.6.7.0 at SourceForge.net
WinPython /WinPython_3.6/3.6.7.0 files. Browse /WinPython_3.6/3.6.7.0 files for WinPython, Portable ...
sourceforge.net
Google Colaboratoryが利用可能です。

Google Colab
colab.research.google.com
ソースコード
やはり17-1の記事のソースコードがベースとなっています。グラフは六角形のマーカーをでっかく表示しています。周囲のマスを足し込む部分が6近傍になっていることを確認してください。
↓WinPythonコード
import numpy as np
import numpy.random as nr
import matplotlib.pyplot as plt
#============================
#初期状態の設定
#============================
#高さ、幅(同じ値にしてください)
h, w = 30, 30
#任意の状態を用意
state = nr.randint(0, 2, (4, 4))
#フィールドのどこに置くか(左上点を指定)
p = (13, 13)
#終了ステップ数
max_step = 100
#マーカーサイズ
marker_size = 130
#============================
#メイン処理
#============================
#フィールドの生成
f = np.zeros((h, w), dtype=bool)
#任意の状態を置く
f[p[0]:p[0]+len(state), p[1]:p[1]+len(state[0])] = state
#表示に用いるx軸とy軸の値を用意
x = np.zeros(h*w)
y = np.zeros(h*w)
for j in range(h):
x[w*j:w*(j + 1)] = np.arange(w)+0.5*j
y[w*j:w*(j + 1)] = np.ones(w)*j*0.866
#初期状態の表示
size = h // 5
plt.figure(figsize=(size*1.5, size*0.866))
plt.scatter(x, y, c=f.flatten(), marker='h', s=marker_size, cmap='inferno')
plt.xlim([-1, h*1.5]); plt.ylim([h*0.866, -1])
#plt.savefig('save/{}.png'.format(0), bbox_inches='tight', pad_inches=0)
plt.show(), print()
#状態の更新
for i in range(1, max_step + 1):
#周囲の生存マス数を記録するための配列
mask = np.zeros((h, w))
#周囲の生存マスを足し込む
mask[1:, :] += f[:-1, :] #上
mask[:-1, :] += f[1:, :] #下
mask[:, 1:] += f[:, :-1] #左
mask[:, :-1] += f[:, 1:] #右
mask[1:, :-1] += f[:-1, 1:] #右上
mask[:-1, 1:] += f[1:, :-1] #左下
#未来のフィールド(すべて死状態)
future = np.zeros((h, w), dtype=bool)
#生きているマスが生きる条件(=生存)
future[mask*f==2] = 1
future[mask*f==4] = 1
future[mask*f==5] = 1
#死んでいるマスが生きる条件(=誕生)
future[mask*~f==2] = 1
future[mask*~f==5] = 1
#フィールドの更新(浅いコピーに注意)
f = future
#表示
size = h // 5
plt.figure(figsize=(size*1.5, size*0.866))
plt.scatter(x, y, c=f.flatten(), marker='h', s=marker_size, cmap='inferno')
plt.xlim([-1, h*1.5]); plt.ylim([h*0.866, -1])
#plt.savefig('save/{}.png'.format(i), bbox_inches='tight', pad_inches=0)
plt.show(), print()↓Colabコード
import numpy as np
import numpy.random as nr
import matplotlib.pyplot as plt
from matplotlib import animation, rc
#============================
#初期状態の設定
#============================
#高さ、幅(同じ値にしてください)
h, w = 30, 30
#任意の状態を用意
state = nr.randint(0, 2, (4, 4))
#フィールドのどこに置くか(左上点を指定)
p = (13, 13)
#終了ステップ数
max_step = 100
#マーカーサイズ
marker_size = 130
#============================
#メイン処理
#============================
#フィールドの生成
f = np.zeros((h, w), dtype=bool)
#任意の状態を置く
f[p[0]:p[0]+len(state), p[1]:p[1]+len(state[0])] = state
#表示に用いるx軸とy軸の値を用意
x = np.zeros(h*w)
y = np.zeros(h*w)
for j in range(h):
x[w*j:w*(j + 1)] = np.arange(w)+0.5*j
y[w*j:w*(j + 1)] = np.ones(w)*j*0.866
#画像をスタックする配列の準備
size = h // 5
fig = plt.figure(figsize=(size*1.5, size*0.866))
plt.xlim([-1, h*1.5]); plt.ylim([h*0.866, -1])
ims = []
#初期状態の表示
im = plt.scatter(x, y, c=f.flatten(), marker='h', s=marker_size, cmap='inferno')
ims.append([im])
#状態の更新
for i in range(1, max_step + 1):
#周囲の生存マス数を記録するための配列
mask = np.zeros((h, w))
#周囲の生存マスを足し込む
mask[1:, :] += f[:-1, :] #上
mask[:-1, :] += f[1:, :] #下
mask[:, 1:] += f[:, :-1] #左
mask[:, :-1] += f[:, 1:] #右
mask[1:, :-1] += f[:-1, 1:] #右上
mask[:-1, 1:] += f[1:, :-1] #左下
#未来のフィールド(すべて死状態)
future = np.zeros((h, w), dtype=bool)
#生きているマスが生きる条件(=生存)
future[mask*f==2] = 1
future[mask*f==4] = 1
future[mask*f==5] = 1
#死んでいるマスが生きる条件(=誕生)
future[mask*~f==2] = 1
future[mask*~f==5] = 1
#フィールドの更新(浅いコピーに注意)
f = future
#表示
im = plt.scatter(x, y, c=f.flatten(), marker='h', s=marker_size, cmap='inferno')
ims.append([im])
#アニメーション表示の準備
print('making animation......')
print('len(ims) = ' + str(len(ims)))
ani = animation.ArtistAnimation(fig, ims, interval=50, blit=True)
#ここにアニメを表示する場合はこちらを有効に
rc('animation', html='jshtml')
ani
#.gifや.mp4を保存する場合はこちらを有効に
#ani.save('aaa.gif', writer='imagemagick',fps=40)
#ani.save('bbb.mp4', writer="ffmpeg")ランダムスタートで実行してみる
ソースコードをそのまま実行すると、4×4のランダムな状態が中心に置かれてスタートします。生き物っぽい感じがします。
雪の結晶(大)
#============================
#初期状態の設定
#============================
#高さ、幅(同じ値にしてください)
h, w = 100, 100
#任意の状態を用意
state = np.array([[0,0,0,0,0,0,1,0,0],
[0,0,0,0,0,1,1,0,0],
[0,0,1,1,0,0,0,1,1],
[0,0,1,0,1,1,0,1,0],
[0,0,0,1,0,1,0,0,0],
[0,1,0,1,1,0,1,0,0],
[1,1,0,0,0,1,1,0,0],
[0,0,1,1,0,0,0,0,0],
[0,0,1,0,0,0,0,0,0]])
#フィールドのどこに置くか(左上点を指定)
p = (46, 46)
#終了ステップ数
max_step = 180
#マーカーサイズ
marker_size = 130出力にとても時間がかかります。下の動画は16MBくらいあるのでご注意ください。
まとめ
これにて一旦、ライフゲームは終わりとします。ぜひ皆さんも実装してSlackで報告してください。または、Twitterでこの記事のURLを添付してつぶやいていただけたら嬉しいです。
2024/10/22追記
動画を公開しました。

