本記事の内容は2019年5月13日に更新されました。
やること
vcoptには、GAの他に局所最適化アルゴリズムが付属しています。GAの性能を見る前に、まずは巡回セールスマン問題の局所最適化を試してみましょう。ここで作成した関数は次回以降のGAでも使えますので。
実行環境
WinPython3.6をおすすめしています。

vcoptの使い方についてはチュートリアルをご参照ください。

vcoptの仕様については最新の仕様書をご参照ください。本記事執筆時とは仕様が異なる場合があります。

import
まずは、今回使うパッケージをインポートします。
import numpy as np
import numpy.random as nr
import matplotlib.pyplot as plt
from vcopt import vcopt巡回セールスマン問題の作成
問題を用意します。この関数は、「町の数」を受け取って、各町の「x座標の配列」と「y座標の配列」を返します(ランダム生成)。
#巡回セールスマン問題の作成
def create_tsp(town_num):
#町のx座標とy座標の配列を作成
town_x = nr.rand(town_num)
town_y = nr.rand(town_num)
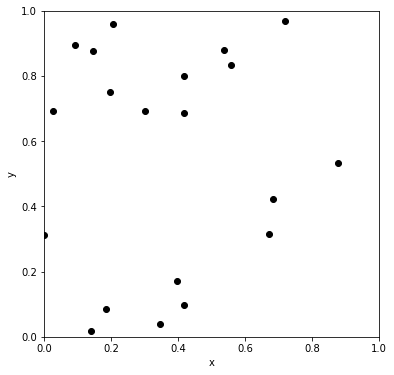
return town_x, town_yこの関数で問題を作成し、プロットしてみましょう。乱数シードを固定すると毎回同じ結果が得られます。
#巡回セールスマン問題の作成
nr.seed(1)
town_num = 20
town_x, town_y = create_tsp(town_num)
#プロット
plt.figure(figsize=(6, 6))
plt.plot(town_x, town_y, 'ok')
plt.xlabel('x'); plt.ylabel('y')
plt.xlim([0, 1]); plt.ylim([0, 1])
plt.show()実行結果
ランダムな道順で歩いてみる
town_xをある道順に従って並び替えるには、town_x[道順]のようにします。town_yも同様です。
#巡回セールスマン問題の作成
nr.seed(1)
town_num = 20
town_x, town_y = create_tsp(town_num)
#ランダムな道順の作成
para = np.arange(town_num)
nr.shuffle(para)
print(para)
#プロット
plt.figure(figsize=(6, 6))
plt.plot(town_x[para], town_y[para], 'ok-')
plt.xlabel('x'); plt.ylabel('y')
plt.xlim([0, 1]); plt.ylim([0, 1])
plt.show()実行結果
[18 16 1 12 17 5 11 13 3 6 8 9 10 14 7 2 19 4 0 15]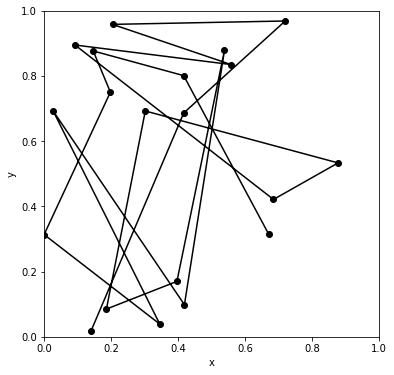
(必須)評価関数
パラメータ群を入れると評価(スコア)が返ってくるような関数を用意します。最適化では、このスコアが小さくなるように(or 大きくなるように or 特定の値に近づくように)パラメータ群を変化させます。
評価関数にはルールがあります。必ず次の形式に従ってください。
#巡回セールスマン問題の評価関数
def 関数名(para):
#スコアの計算
score = ...
return scoreこの形式に従い、すべての町を訪れる際の総距離を返す評価関数はこうなります。
#巡回セールスマン問題の評価関数
def tsp_score(para):
#スコアの計算(今回は直接returnする)
return np.sum(((town_x[para][:-1] - town_x[para][1:])**2 + (town_y[para][:-1] - town_y[para][1:])**2)**0.5)ちょっとスコア計算の式がわかりにくいと思いますが、2点間の距離を配列のまま一度に算出して、sumしています。
(任意)ひとつのパラメータ群を可視化する関数
もう最適化は実行できるのですが、最適化の様子を可視化するための関数を用意しておきましょう。
可視化のための関数にもルールがあります。必ず次の形式に従ってください。
#巡回セールスマン問題の可視化
def 関数名(para, **info):
#2-opt処理中の諸情報はinfoという辞書に格納されて渡されます
#これらを受け取って使用することができます
step_num = info['step_num']
score = info['score']
#可視化
...この形式に従うと、すべての町を訪れる道順を可視化する関数はこうなります。お好みでstep_numとscoreも使用できます。
#paraの可視化
def tsp_show_para(para, **info):
#2-opt処理中の諸情報はinfoという辞書に格納されて渡されます
#これらを受け取って使用することができます
step_num = info['step_num']
score = info['score']
#プロット(および保存)
plt.figure(figsize=(6, 6))
plt.plot(town_x[para], town_y[para], 'ok-')
plt.xlabel('x'); plt.ylabel('y')
plt.xlim([0, 1]); plt.ylim([0, 1])
plt.title('step={}, score={}'.format(step_num, score))
#plt.savefig('save/{}.png'.format(step_num))
plt.show()
print()2-opt法で局所最適化
いよいよ最適化を実行します。
#巡回セールスマン問題の作成
nr.seed(1)
town_num = 20
town_x, town_y = create_tsp(town_num)
#適当に道順を作成
para = np.arange(town_num)
#2-opt法で最適化
para, score = vcopt().opt2(para, #para
tsp_score, #score_func
0.0, #aim
show_para_func=tsp_show_para, #show_para_func=None
seed=1) #seed=None
#結果の表示
print(para)
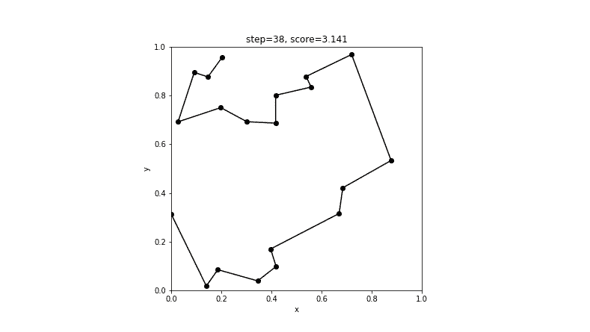
print(score)実行結果
[12 4 5 14 19 3 16 0 17 9 1 13 11 15 8 10 7 6 18 2]
3.14083674852790838回の更新で、最短距離3.141のルートが返ってきました。

