本記事の内容は2019年5月13日に更新されました。
やること
巡回というくらいですから、セールスマンは戻ってこなければいけません。もちろんvcoptでできます。
実行環境
WinPython3.6をおすすめしています。

vcoptの使い方についてはチュートリアルをご参照ください。

vcoptの仕様については最新の仕様書をご参照ください。本記事執筆時とは仕様が異なる場合があります。

考え方
8-3は、[0, 1, 2, … , 19]の20パラメータ(20都市を訪れる順番)を並び替える問題でした。
閉路問題とする場合、0を除いて[1, 2, … , 19]の19パラメータの並び替え問題とし、評価関数と可視化関数の中で、前後に0を付けて[0, 1, 2, … , 19, 0]として計算や表示を行います。このようにすれば、0からスタートして0に帰って来る距離を最適化できます。
import
まずは、今回使うパッケージをインポートします。
import numpy as np
import numpy.random as nr
import matplotlib.pyplot as plt
from vcopt import vcopt関数の準備
巡回セールスマン問題の作成。これまでと同じです。
#巡回セールスマン問題の作成
def create_tsp(town_num):
#町のx座標とy座標の配列を作成
town_x = nr.rand(town_num)
town_y = nr.rand(town_num)
return town_x, town_y(必須)評価関数。paraの前後に0を付けてpara_fullとし、距離を計算します。
#巡回セールスマン問題の評価関数
def tsp_score(para):
#paraの前後に0を付ける(0からスタートし0でゴールする)
para_full = np.hstack((0, para, 0))
#スコアの計算(今回は直接returnする)
return np.sum(((town_x[para_full][:-1] - town_x[para_full][1:])**2 + (town_y[para_full][:-1] - town_y[para_full][1:])**2)**0.5)(任意)ひとつのパラメータ群を可視化する関数。これも、paraの前後に0を付けてpara_fullとし、プロットします。スタート/ゴール地点は赤丸(中が白)で上書き表示します。
#paraの可視化
def tsp_show_para(para, **info):
#2-opt処理中の諸情報はinfoという辞書に格納されて渡されます
#これらを受け取って使用することができます
step_num = info['step_num']
score = info['score']
#paraの前後に0を付ける(0からスタートし0でゴールする)
para_full = np.hstack((0, para, 0))
#プロット(および保存)
plt.figure(figsize=(6, 6))
plt.plot(town_x[para_full], town_y[para_full], 'ok-')
#スタート/ゴール地点を赤丸(中が白)で上書き
plt.plot(town_x[0], town_y[0], 'or', markerfacecolor='w')
plt.xlabel('x'); plt.ylabel('y')
plt.xlim([0, 1]); plt.ylim([0, 1])
plt.title('step={}, score={}'.format(step_num, score))
#plt.savefig('save/{}.png'.format(step_num))
plt.show()
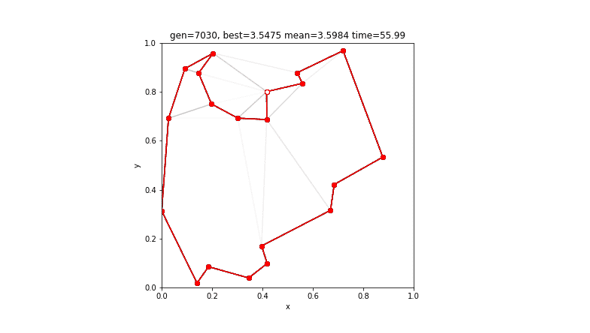
print()(任意)すべてのパラメータ群を可視化する関数。poolの前後に0列を付けてpool_fullとし、プロットします。先と同様に、スタート/ゴール地点は赤丸(中が白)で上書き表示します。
#巡回セールスマン問題のpoolの可視化
def tsp_show_pool(pool, **info):
#GA中の諸情報はinfoという辞書に格納されて渡されます
#これらを受け取って使用することができます
gen = info['gen']
best_index = info['best_index']
best_score = info['best_score']
mean_score = info['mean_score']
mean_gap = info['mean_gap']
time = info['time']
#poolの前後に0列を付ける(すべてのparaが0からスタートし0でゴールする)
pool_full = np.hstack((np.zeros(len(pool), dtype=int).reshape(len(pool), 1), pool, (np.zeros(len(pool), dtype=int).reshape(len(pool), 1))))
#プロット
plt.figure(figsize=(6, 6))
#pool_fullを100個まで薄い黒でプロット
for para in pool_full[:100]:
plt.plot(town_x[para], town_y[para], 'ok-', alpha=(2.0/len(pool[:100])))
#エリートは赤でプロット
plt.plot(town_x[pool_full[best_index]], town_y[pool_full[best_index]], 'or-')
#スタート/ゴール地点を赤丸(中白)で上書き
plt.plot(town_x[0], town_y[0], 'or', markerfacecolor='w')
#タイトルをつけて表示
plt.xlabel('x'); plt.ylabel('y')
plt.xlim([0, 1]); plt.ylim([0, 1])
plt.title('gen={}, best={} mean={} time={}'.format(gen, best_score, mean_score, time))
#plt.savefig('save/{}.png'.format(gen_num))
plt.show()
print()具体的には、次のような処理をしています。
pool
[[18 16 1 12 17 5 11 13 3 6 8 9 10 14 7 2 19 4 15],
[ 7 4 1 9 16 3 17 5 6 14 13 15 12 8 2 10 18 11 19],
[ 9 17 16 1 8 6 5 15 7 19 2 12 13 14 18 3 4 11 10],
…
[12 1 8 11 16 4 19 15 3 5 14 2 9 17 10 13 7 6 18]]
↓
pool_full
[[0 18 16 1 12 17 5 11 13 3 6 8 9 10 14 7 2 19 4 15 0],
[ 0 7 4 1 9 16 3 17 5 6 14 13 15 12 8 2 10 18 11 19 0],
[ 0 9 17 16 1 8 6 5 15 7 19 2 12 13 14 18 3 4 11 10 0],
…
[ 0 12 1 8 11 16 4 19 15 3 5 14 2 9 17 10 13 7 6 18 0]]2-opt法で最適化
20都市で実行してみます。適当な順路(para)を生成する際、0を含まないように注意します。
#巡回セールスマン問題の作成
nr.seed(1)
town_num = 20
town_x, town_y = create_tsp(town_num)
#適当に道順を作成(ただし0の町は含まない)
para = np.arange(1, town_num)
nr.shuffle(para)
#2-opt法で最適化
para, score = vcopt().opt2(para, #para
tsp_score, #score_func
0.0, #aim
show_para_func=tsp_show_para, #show_para_func=None
seed=1) #seed=None
#結果の表示
print(para)
print(score)実行結果
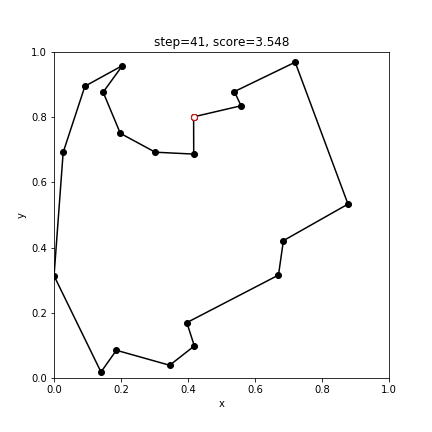
[17 9 1 13 11 15 8 10 7 6 18 2 14 5 12 4 19 3 16]
3.5475293979312674The 閉路。
GAで最適化
こちらも問題を作成し、GAを実行します。こちらも同様に、並び替えるべき順路(para_range)に0を含まないように注意します。
#巡回セールスマン問題の作成
nr.seed(1)
town_num = 20
town_x, town_y = create_tsp(town_num)
#パラメータ範囲(ただし0の町は含まない)
para_range = np.arange(1, town_num)
#GAで最適化
para, score = vcopt().tspGA(para_range, #para_range
tsp_score, #score_func
0.0, #aim
show_pool_func=tsp_show_pool, #show_pool_func=None
seed=1) #seed=None
#結果の表示
print(para)
print(score)実行結果
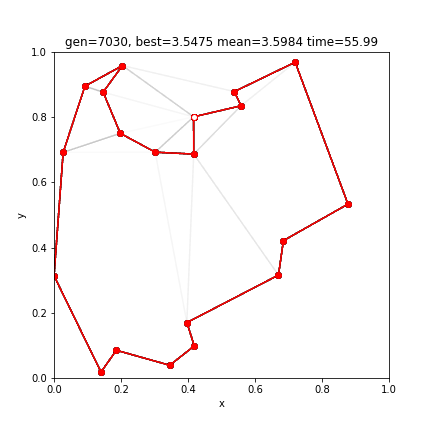
[17 9 1 13 11 15 8 10 7 6 18 2 14 5 12 4 19 3 16]
3.5475293979312674結果、閉路にしたことで、偶然に2-opt法とGAの結果が一致しました(ちょうどぐるっと一周しやすい配置だったため)。もっと複雑な配置であれば差が出ると思います。

